
What Tesla did for cars, they're doing for drones.
Founded by Ex-ETH, 6 years experience in robotics, raised $1M in seed funding


Quick Summary
Sector: Drone Autonomy Infrastructure
Stage: Early-stage commercial deployment started
Founders: Kunal & Kevin, ETH Zurich, robotics autonomy background
Product: Bumblebee (agri sprayer) + Wasp (multipurpose inspection/ISR platform)
Market Focus: India first (orchards and complex farms), then SEA, South America, Africa
Opportunity: Solving the biggest unsolved problem in drones
What happens when a drone flies below 10 metres?
In 2016, Kunal Shrivastava and Kevin Kleber spent four years at ETH Zurich’s Robotics and Perception Group. This lab was among the first in the world to fly a drone indoors using only cameras.
No GPS. No motion capture. No human pilot.
Kevin’s research earned 300+ citations. Referenced by MIT and NASA.
Their professor, Davide Scaramuzza, pioneered the entire field. His lab recently beat world champion human pilots in autonomous drone racing.
By 2020, Kunal and Kevin had a question that wouldn’t leave them alone.
If drones can see and navigate inside a lab, why do commercial drones still crash into trees?
They tried selling their vision software to two drone companies. One in agriculture. One in offshore logistics. The tech worked. Then COVID killed both projects.
So they made a bigger bet. They moved to Bangalore and built the entire drone themselves.
That company is SUIND.
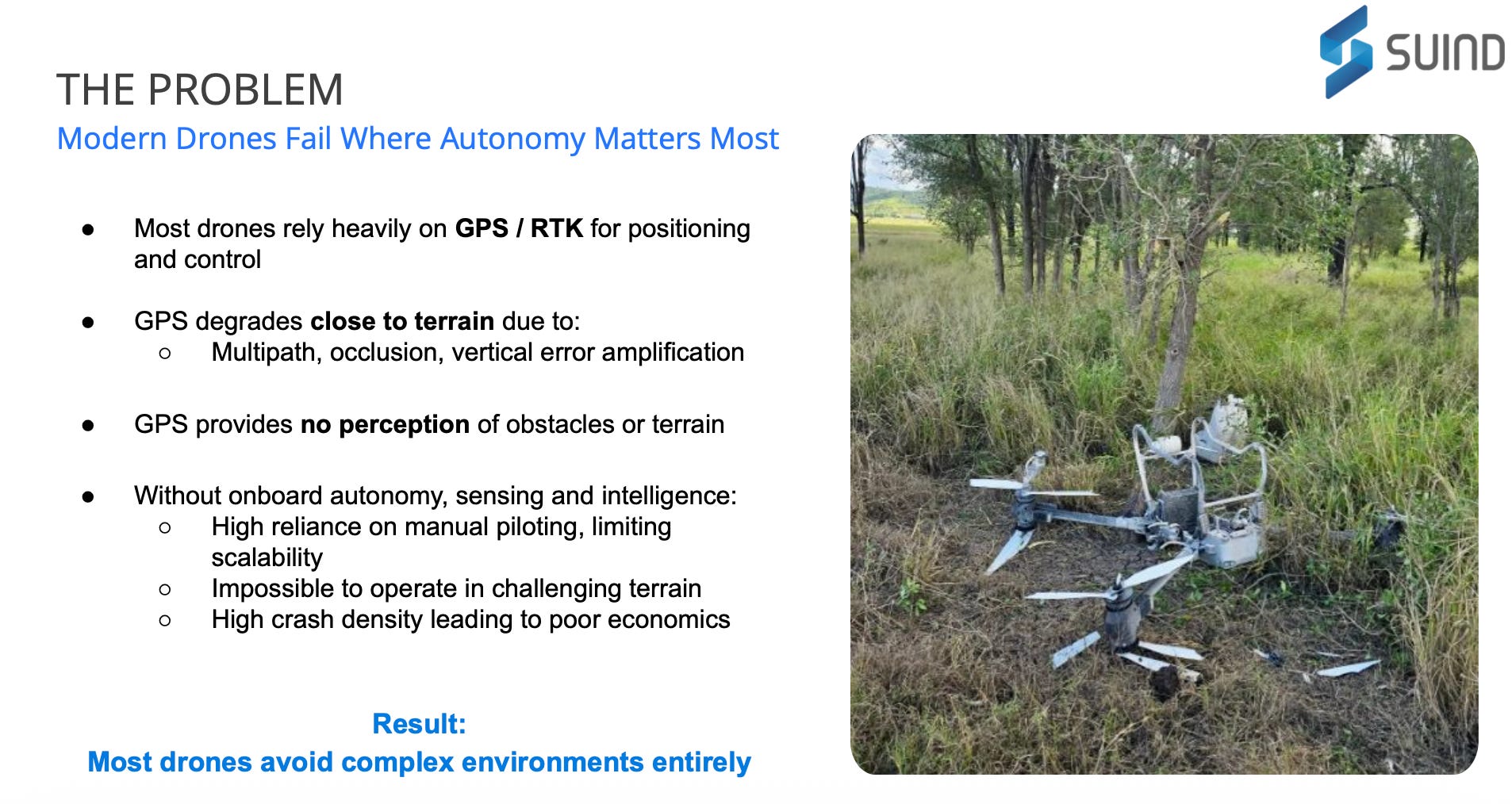
Why do drones work well at 200 m but fails at 20 m?
Most drones crash because they can’t see.
That sounds strange. Drones fly with GPS, radars, and sensors. But here’s what happens when a drone operates three metres above the ground, weaving through mango trees and rubber plantations: GPS stops working.
Radar can’t detect thin branches. And one wrong move means the entire platform crashes and needs expensive repairs.
This is the biggest problem holding back the global drone industry from scaling into agriculture, infrastructure inspection, and defence surveillance. The high-value use cases all happen close to terrain.
And close to terrain is where every existing drone system falls apart.
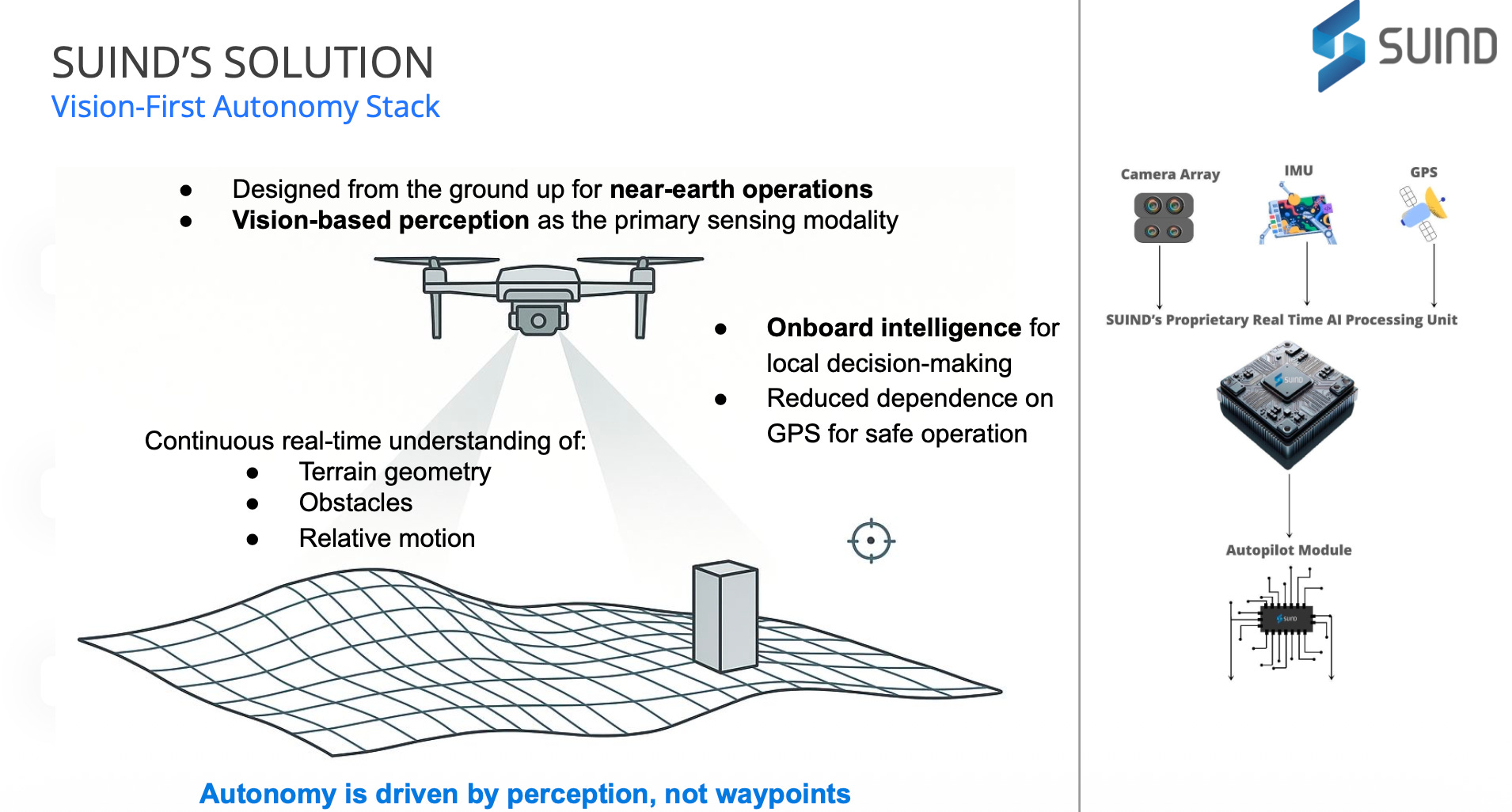
SUIND built perception first, then the drone around it.
SUIND’s approach is the reverse of what most drone companies do.
Instead of building a drone and then bolting on sensors, they built the vision-based autonomy system first and designed the hardware around it.
Their system uses low-resolution greyscale cameras to build a real-time 3D map of the environment at 20 frames per second.
It processes 18 million data points every second. The same cameras handle obstacle avoidance, terrain following, precision landing, and even targeted spraying.
The technical term is Visual SLAM (Simultaneous Localisation and Mapping). The drone is mapping its environment and locating itself within that map at the same time. No GPS required.
This is hard to do on a drone because compute power is limited.
You can’t carry a heavy computer on a flying machine. SUIND runs all of this on lightweight, low-power embedded processors that they’ve optimised from first principles.
Bumblebee: proven in 25+ crops with zero incidents.
SUIND’s first commercial product is Bumblebee, a type-certified agricultural spraying drone built specifically for orchards and complex terrain.
Why agriculture first? Two reasons:
1. Indian farmland gave them unrestricted airspace to accumulate thousands of flight hours under real commercial conditions, not just lab tests.
2. Orchards are among the most difficult drone environments globally: uneven slopes, tall trees, narrow takeoff spaces, and chemical fumes interacting with the hardware.
Bumblebee has now operated across 25+ crop types, including mango, rubber, pomegranate, apple, sugarcane, and banana. And it has completed 2,500+ commercial flight hours with zero crashes.
At $15,000 per unit, Bumblebee costs half of what a fully equipped DJI agricultural drone costs. And it operates where DJI systems struggle.
Here’s their product demo:
The team behind SUIND.
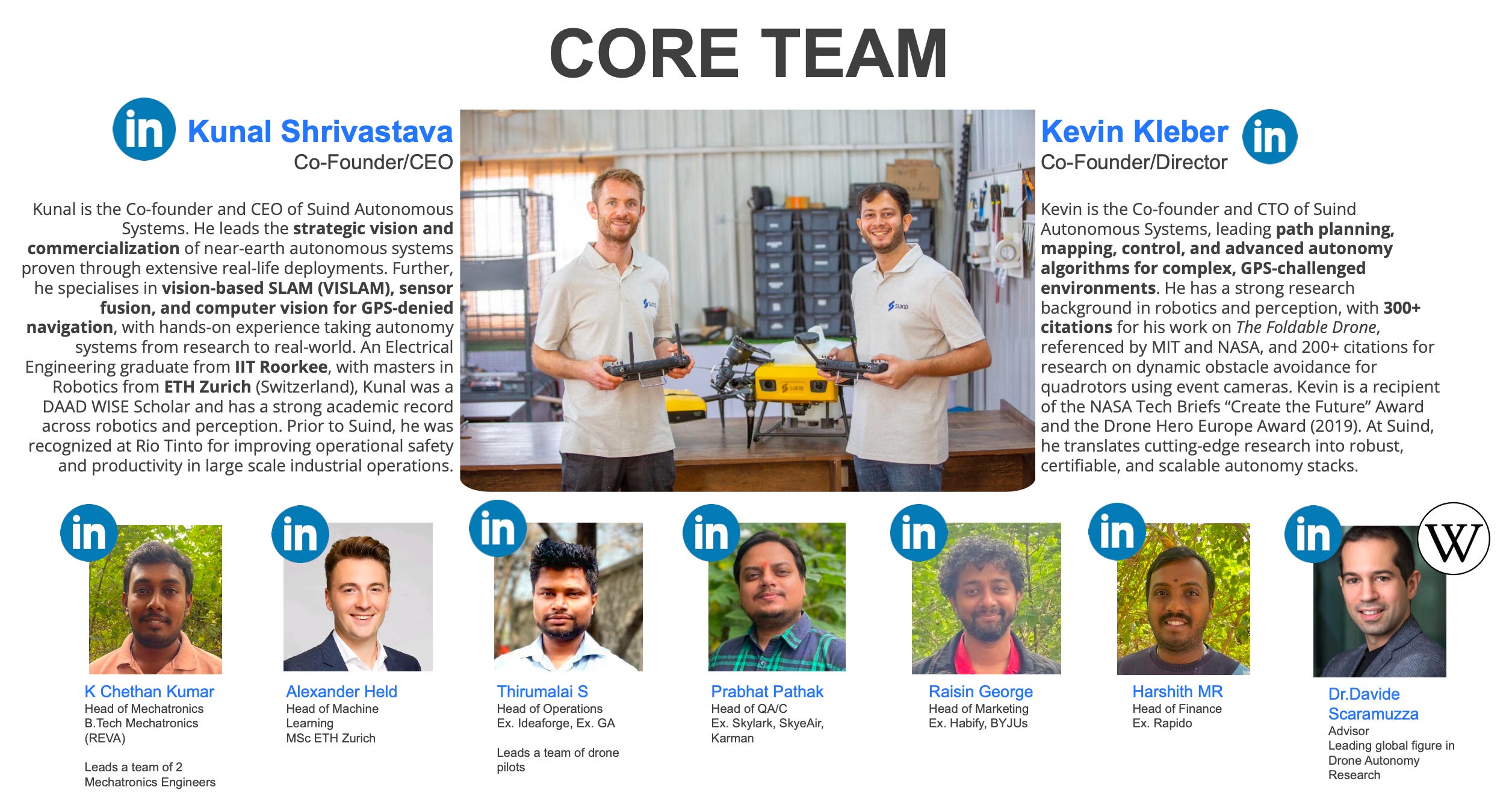
Kunal Shrivastava (Co-founder/CEO) — IIT Roorkee (Electrical Engineering) + ETH Zurich (MSc Robotics). Specialises in visual SLAM, sensor fusion, and computer vision. Previously recognized at Rio Tinto for improving operational safety.
Kevin Kleber (Co-founder/CTO) — ETH Zurich. Leads path planning, mapping, and advanced autonomy algorithms. 300+ citations for his foldable drone research (referenced by MIT and NASA). NASA Tech Briefs “Create the Future” Award. Drone Hero Europe Award (2019).
Early traction…
32 Bumblebee units on order.
Eight delivered. Marketing started only a month ago.
Their target is 200 units by the end of 2026, roughly $2.9–3.0 million in revenue.
Revenue model: hardware (upfront) + software (subscription).
GVP Take
Both founders spent years doing fundamental drone autonomy research at ETH Zurich in Switzerland. Their advisor, Professor Davide Scaramuzza, pioneered the field. His lab recently beat world champion human pilots in autonomous drone racing.
Most drones depend on GPS, radar, or LiDAR to navigate. SUIND uses only cameras. Same approach Tesla took with self-driving cars. No radar. No LiDAR. Just vision.
That matters for two reasons:
- Cameras are 10x lighter and cheaper than radar or LiDAR.
- And they capture far more detail, like thin branches, individual trees, and terrain changes that radar misses.
Very few drones in the world can operate autonomously close to surfaces.
That’s where the most valuable use cases such as orchards, bridges, borders, buildings.
They already have paying customers. DGCA type certified.
Worth watching: manufacturing capacity is still early. WASP is pre-commercial. And Skydio in the US uses a similar vision-based approach.
They’ve raised ~$1M so far. Seed round planned.
If you want me to make a warm intro with this startup, feel free to reply to this email!
Email: jaylee@globalventureplay.com
Whatsapp: +821068181518